Konspekt Robotika
1. Mis on robot? Maailma esimene robot.
Robot on mehaaniline intelligentne seade, mis on võimeline iseseisvalt või välise abiga (inimese
poolt) ülesandeid lahendama.
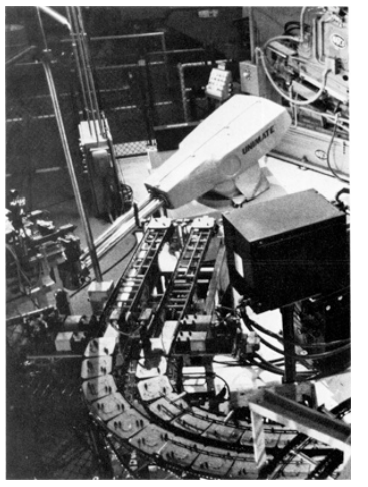
Maailma esimene robot Unimate, mis võttis valuvormist kuumusest veel punaseid autode
ukse käepidemeid, jahutas neid vedelikus ja suunas edasiseks töötlemiseks liinile.
2. Robotite arendamis põlvkonnad. Nimeta ja seleta.
Robotid võib oma arengutasemelt jagada kolme põlvkonda:
Esimene põlvkond. Esimese põlvkonna robotid olid lihtsa ehitusega ning neil puudus
ümbrusetaju ehk andurid. Oma tööd suutsid nad teha vaid mittemuutuvates tingimustes.
Näiteks robotkäsi, mis tõstab õlletehases pudeleid kastidesse. Robot sooritab identseid
liigutusi, aga kuna tal ei ole ümbritsevast keskkonnast mitte mingit signaali, st ta ei saa oma
tegevuse kohta mittemingisugust tagasisidet, siis keskonna muutuse korral ta enam ei tööta
korralikult. Selliseid roboteid tänapäeval enam ei loetagi õigeteks robotiteks.
Teine põlvkond. Teise põlvkonda kuuluvad robotid (vt joonis 2), mis suudavad andurite läbi
reageerida keskkonnas toimuvatele muutustele. Kuna robot suudab keskkonda tunnetada, siis
roboti efektiivsus oleneb suures osas tarkvarast, mis teda juhib. Ka antud kursuse käigus
kasutatavad robotid kuuluvad kõik teise põlvkonda, kui kasutada neil andureid keskkonna
tunnetamiseks ning programmeerida nad iseseisvalt tegutsema.

Kolmas põlvkond. Kolmas põlvkond on veel väljatöötamisel. Kolmanda põlvkonna robotid
suudavad olukordi analüüsida ning õppida. Näiteks filmis „Mina, Robot” olev robot, mis suudab
järeldusi teha ning sellest õppida, on kolmandast põlvkonnast.
Liigita järgnevad robotid põlvkondade kaupa:
- nõudepesumasin, 1 põlvkond
- fikseeritud liikumisega robotkäsi, 1 põlvkond
- automaatselt süttiv lamp, 1 põlvkond
- ise keeli õppiv robot, 3 põlvkond
3. Miks manipulaatorid ei ole robotid?
Manipulaator on seade või masin, mida inimene juhib. Erinevalt väärarusaamadest pole
manipulaatorid robotid, kuna neid juhib vahetult inimene. Manipulaatorid pole võimelised
autonoomselt töötama.
4. Mis on masinate eelised võrreldes inimtööjõuga?
Kuna robotid on mehhaanilised seadmed, siis nad ei väsi ega tüdine, mis teeb nad ideaalseteks rutiinse töö tegijateks. Seepärast kasutatakse roboteid paljudes tööstusettevõtetes üksluise töö kiiremaks ning kvaliteetsemaks tegemiseks. Lisaks ei ole robotid nii tundlikud töötingimuste koha pealt kui inimesed, neid saab kasutada ka mürarikastes halvasti valgustatud töökohtades ja isegi sellistes kohtades, kus inimese töötamine on eluohtlik kiirguse vms tõttu. Roboteid kasutatakse ka seal, kuhu inimesi ei saa saata tööd tegema, nt ookeanipõhja uurima ja Marsile. Peale selle saab roboteid kasutada ka meelelahutuslikel eesmärkidel. Näiteks intelligentsed mänguasjad ja tantsivad robotid.
5. Millised kolm tingimust peavad olema täidetud, et teatud masinat või seadet saaks robotiks nimetada?
- Sensorid, mis saavad informatsiooni
- Kontroller, mis analüüsib informatsiooni
- Uuest informatsioonist tegemise muutmine
6. Millistes Eesti tööstusettevõtetes võiksid mehhatroonikud töötada?
Tartu ja Tallinn lennujaam.
Kirjuta definitsioonid:
- Robot — on masin — eriti üks programmeeritav arvuti — võimeline teostama keerulisi tegevusi automaatselt.
- Robootika -tehnikateaduse ja tehnoloogia valdkond, mis tegeleb kõigega, mis on vajalik robotite ehitamiseks : disain, konstrueerimine, algoritmide väljatöötamine, robotite valmistamine ja rakenduste leidmine.
- Manipulaator — on seade või masin, mida inimene juhib
- Mehhatroonika — on mehaanika, elektroonika ja informaatika sünergeetilisel koostoimel põhinev rakendusteadus
- Andur — seade, mis muudab füüsikalise suuruse (kaugus, temperatuur jne) elektrisignaaliks, mida on parem edastada, töödelda ja võimendada.
- Täitur — seade mis teostab mingit operatsiooni, näiteks põhjustab liikumise
- Kontroller — väike arvuti, mida kasutatakse protsesside või masinate juhtimiseks. Selleks on kontrollerile laaditud inimese koostatud programm.
Elekter. Mikrokontroller. Põhikomponendid
- Elekter/Электричество
Если постоянно и монотонно трансформировать электроэнергию в другую форму, область
применения электричества будет сильно ограничена. Огромный мир разнообразных полезных
устройств открывается, если научиться контролировать и взаимодействовать с
электричеством. Для этого существует несколько способов
- Elektriahi/Электрическая цепь
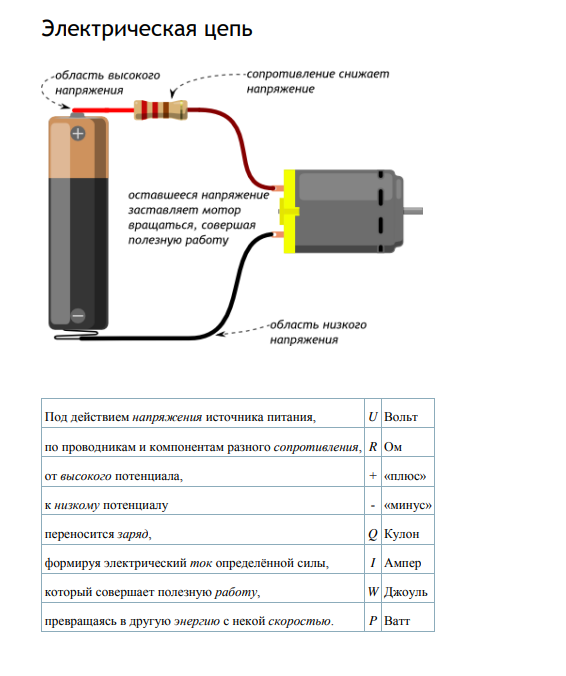
Чтобы изобразить на бумаге как должна выглядеть та или иная электрическая цепь
используют схемы. Схемы бывают разных видов со своими преимуществами и недостатками.
Ниже приведена одна и та же электрическая схема, изображённая по-разному, в четырёх
вариациях.
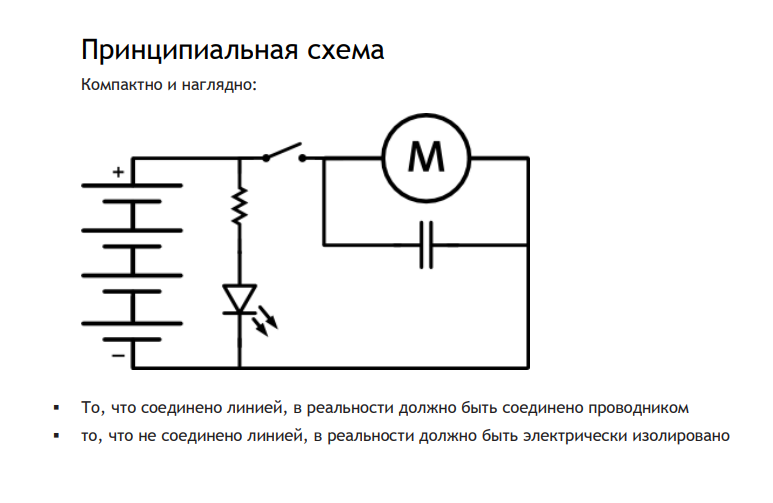
- Рисованная и принципиальная схема(примеры)

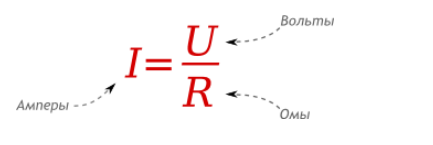
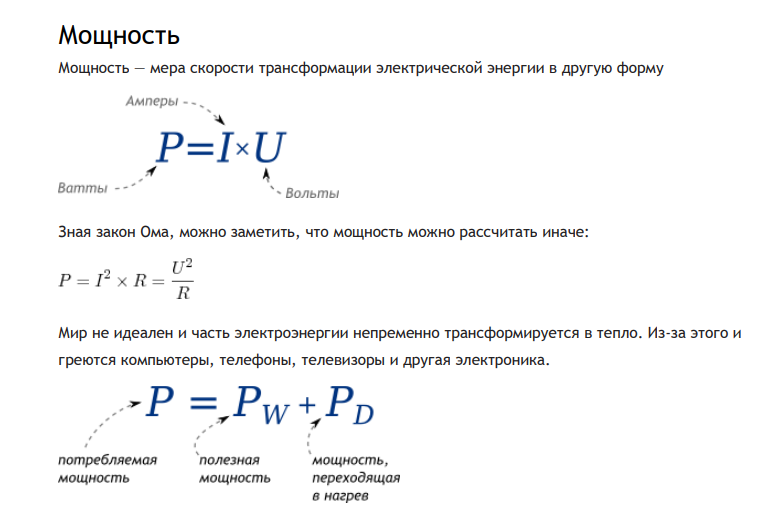
- Закон Ома
Закон Ома — главный закон электричества
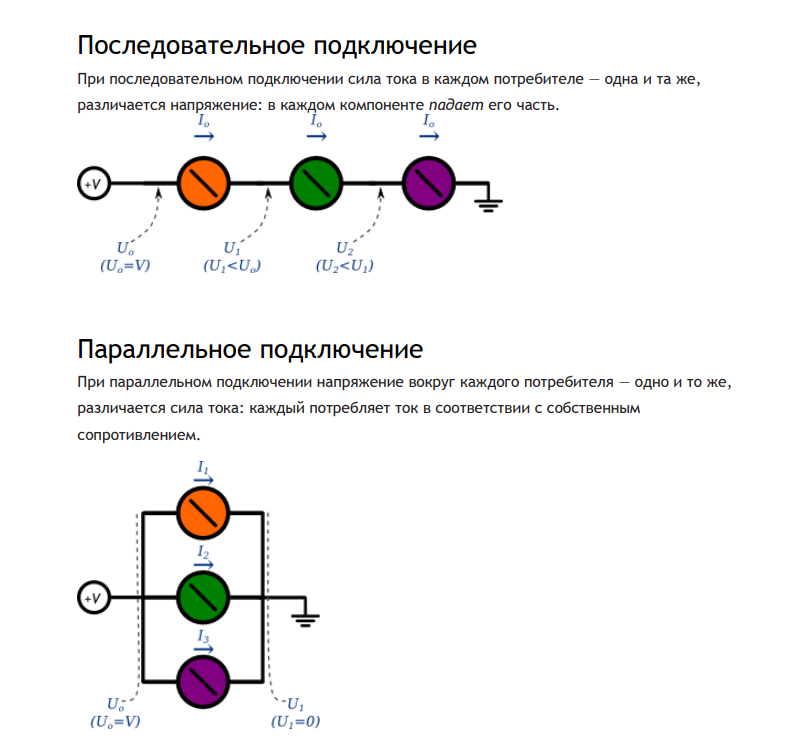
- Параллельное и последовательное соединение(опиши основные принципы)
- Микроконтроллер(примеры, картинки). Подробно разобрать составляющие платы Arduino Uno.
- Põhikomponeendid Arduino:
- Valgusdiood (LED)/светодиод,
- Nupp/кнопка,
- Piesosummer/пищалка,
- Fototakisti/фоторезистор,
- Takisti/резистор,
- Potentsiomeeter/потенцтометр,
- Temperatuuriandur/термодатчик,
- Servomootor/серводвигатель,
- Mootor/моторчик,
- Vedelkristallekraan/LCD экран